


Servo digitale programmabile standard con ingranaggi in titanio e doppio albero di uscita BB-ed per l'uso generale in tutti i tipi di modelli RC - ideale per grandi modelli di aerei, auto RC 1:10, ecc. Alloggiamento in plastica con radiatore centrale in alluminio per un perfetto raffreddamento sotto carico.
Il GO-1053MG è programmabile con il servo programmatore KAVAN GO/interfaccia USB e il software per PC.
Ampio intervallo di tensione di ingresso 4,8-8,4 V (nominale).
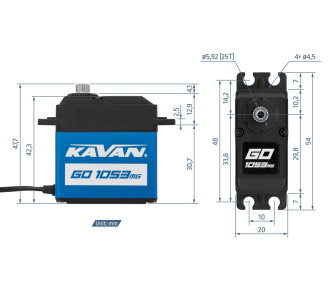
Albero di uscita 25T/5,92 mm.
Tipo di servo Digitale
Programmabile Sì
Spinta a 4,8V [kg/cm] 13
Spinta a 6,0V [kg/cm] 15
Spinta a 7,4V [kg/cm] 18
Spinta a 8,4V [kg/cm] 20
Velocità a 4,8V [s/60st] 0,23
Velocità a 6,0V [s/60s] 0,21
Velocità a 7,4V [s/60sec] 0,2
Velocità a 8,4V [s/60s] 0,17
Servoingranaggi in titanio
Cuscinetti a sfera 2×
Alta tensione Sì
Alimentazione [V] 4,8 - 8,4
Lunghezza [mm] 40
Larghezza [mm] 20
Altezza [mm] 42,3
Peso [g] 63
Adatto per aerei, autovetture, veicoli fuoristrada, imbarcazioni
Funzioni programmabili
Angolo del servo: imposta l'intervallo massimo dell'angolo di rotazione del servo. L'intervallo predefinito è di circa 120° nella normale gamma di larghezza degli impulsi del segnale RC (900~2100 µs); circa 180° nella massima gamma di larghezza degli impulsi del segnale (500~2500 µs).
Neutro del servo: impostare la posizione neutra (centrale) del servo.
Fattore di smorzamento: Imposta lo smorzamento del servo - regola le caratteristiche del servo a riposo.
Potenza PWM: regola la potenza di uscita del servo. Maggiore è la potenza, maggiore è la velocità e la coppia del servo, ma maggiore è il consumo di corrente.
Sensibilità: regola la sensibilità del servo (banda morta). Più alta è la sensibilità, più stretta è la banda morta: il servo si muove solo se la variazione dell'ampiezza dell'impulso del segnale è maggiore dell'ampiezza della banda morta. L'impostazione di una sensibilità troppo elevata può causare l'instabilità del servo in alcune applicazioni. Campo di impostazione: Altissimo (banda morta di circa 1 µs) - Alto (circa 2 µs) - Medio (circa 3 µs) - Basso (circa 4 µs)
Soft start: abilita/disabilita la funzione di soft start. Se abilitata, all'accensione il servo si sposta lentamente nella posizione iniziale corrispondente al segnale del servo.
Inversione: inverte la direzione del movimento del servo.
Banda stretta: modalità SR FUTABA - da utilizzare solo con i canali radio FUTABA che operano in modalità SR. Non attivare questa opzione se si utilizza un'impostazione diversa sulla radio FUTABA o su qualsiasi altra radio.
SANWA SSR: Modalità SANWA SSR - da utilizzare solo con i canali radio SANWA che operano in modalità SSR. Non attivare questa opzione se si utilizza un'impostazione diversa sulla radio SANWA o su qualsiasi altra radio.
PPM Fail-Safe: Nel caso in cui il segnale di controllo dal ricevitore venga completamente perso o non possa essere decodificato correttamente (a causa di interferenze), il servo può scegliere una delle tre modalità di sicurezza:
(a) Rilascio: nessuna protezione di sicurezza.
(b) Mantieni posizione: mantiene la posizione corrispondente all'ultimo segnale di controllo corretto.
(c) Vai alla posizione neutra: Il servo ritorna alla posizione neutra (larghezza dell'impulso di 1500 µs).
Protezione da sovraccarico: abilita o disabilita la protezione da sovraccarico del servo a tre stadi - una volta che le condizioni di sovraccarico durano per il tempo preimpostato (in secondi), la potenza di uscita del servo viene ridotta al corrispondente livello preimpostato (% della potenza massima).
Default: ripristina le impostazioni di fabbrica del servo collegato.











Servo digitale programmabile standard con ingranaggi in titanio e doppio albero di uscita BB-ed per l'uso generale in tutti i tipi di modelli RC - ideale per grandi modelli di aerei, auto RC 1:10, ecc. Alloggiamento in plastica con radiatore centrale in alluminio per un perfetto raffreddamento sotto carico.
Il GO-1053MG è programmabile con il servo programmatore KAVAN GO/interfaccia USB e il software per PC.
Ampio intervallo di tensione di ingresso 4,8-8,4 V (nominale).
Albero di uscita 25T/5,92 mm.



