








































































































































































.jpg)













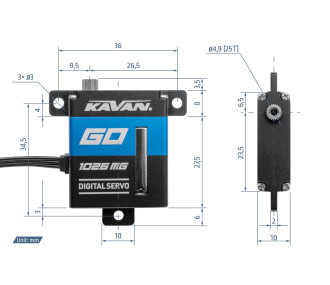


Micro servo numérique programmable très robuste avec engrenages en acier et arbre de sortie monté sur deux roulements à billes pour une utilisation dans les modèles RC de tous types. Le boîtier plat de 10 mm du servo le rend particulièrement adapté au contrôle des ailerons et des volets dans les modèles de planeurs RC avec des profils d'ailes minces. Le servo est logé dans un boîtier en aluminium pour un refroidissement parfait même sous des charges élevées.A l'aide du programmateur/interface USB pour les servos GO et du programme opérateur PC, vous pouvez programmer une large gamme de paramètres de servo (points de fin de course du servo, position inverse et neutre du servo, protection contre les surcharges, démarrage progressif, sécurité intégrée, etc...).Tension d'alimentation accrue 6,0-7,4 V (nominal).
Arbre de sortie à 25 dents.
 Paiement sécurisé
Paiement sécurisé
 Livraison 24/48h
Livraison 24/48h
 Paiement 3X
Paiement 3X
Type de servo Numérique
Poussée à 6,0 V [kg/cm] 8,2
Poussée à 7,4V [kg/cm] 10
Poussée à 8,4V [kg/cm] 11
Vitesse à 6,0V [s/60st.] 0,15
Vitesse à 7,4V [s/60st.] 0,12
Vitesse à 8,4V [s/60st.] 0,11
Servo-engrenages Métal
Roulements à billes 2×
Haute tension Oui
Alimentation [V] 6 - 8,4
Longueur [mm] 29
Largeur [mm] 10
Hauteur [mm] 30,5
Poids [g] 26
Destiné aux avions
Alimentation électrique : USB (5 V/500 mA)
Système d'exploitation : Windows® XP/Vista/7/8/10 (32/64bit)
Port USB : USB 2.0
Servos compatibles : Série KAVAN GO-10xx
Fonctions programmables
Angle du servo : Utilisé pour définir la course maximale du servo. Le réglage par défaut est d'environ 120° pour une largeur d'impulsion de commande normale (900~2100 µs) ; d'environ 180° pour une largeur d'impulsion de commande maximale autorisée (500~2500 µs).
Neutre du servo : Permet de définir la position neutre (centrale) du servo.
Damping Factor (Facteur d'amortissement) : Définit les caractéristiques du comportement d'arrêt du servo.
PWM Power (Puissance PWM) : définit la puissance de sortie du servo. Plus la valeur est élevée, plus le servo est rapide et plus il a de poussée - bien sûr, la consommation de courant sera proportionnellement plus élevée. Plage de valeurs : 39.2~100%
Sensibilité : Règle la sensibilité (bande passante d'insensibilité) du servo. Plus la valeur est élevée, plus la bande passante d'insensibilité est étroite - le servo ne se déplace que si le changement de largeur du signal de commande est supérieur à la bande passante d'insensibilité. Un réglage trop élevé de la valeur de sensibilité peut entraîner une oscillation du servo dans certaines applications. Plage : Ultra High (Extra High - largeur de bande de sensibilité d'environ 1 µs) - High (High - environ 2 µs) - Medium (Medium - environ 3 µs) - Low (Low - environ 4 µs)
Démarrage progressif : Active/désactive la fonction de démarrage progressif. Cette fonction empêche le servo de se mettre brusquement en position de fonctionnement après la mise sous tension, ce qui réduit le risque d'endommager les engrenages du servo.
Inversion : Inverse le sens du mouvement du servo.
Mode FUTABA SR : Utilisé uniquement avec le système FUTABA RC fonctionnant en mode SR. N'activez pas cette option si vous utilisez un autre réglage de système RC FUTABA ou une autre marque de système RC.
Mode SSR SANWA : Utilisé uniquement avec le système RC SANWA fonctionnant en mode SSR. N'activez pas cette option si vous utilisez un réglage de système RC SANWA différent ou une autre marque de système RC.
Sécurité intégrée : Si le signal de commande du récepteur est complètement perdu ou si le servo ne peut pas détecter le signal correctement (par exemple en raison d'interférences), le servo peut entrer dans l'un des trois modes de sécurité :
(a) Libre : La sécurité intégrée est désactivée.
(b) Maintien de la position : le servo maintient la position correspondant au dernier signal correctement reçu.
(c) Transition vers le neutre : Le servo revient à la position neutre (largeur d'impulsion de 1500 µs).
Protection contre les surcharges : active ou désactive la protection contre les surcharges du servo à trois niveaux - une fois que la surcharge a duré pendant une durée prédéfinie (en secondes), la puissance de sortie du servo est limitée à la valeur prédéfinie correspondante (en % de la puissance maximale).
Réinitialisation : Rétablit les paramètres d'usine par défaut du servo connecté.





Micro servo numérique programmable très robuste avec engrenages en acier et arbre de sortie monté sur deux roulements à billes pour une utilisation dans les modèles RC de tous types. Le boîtier plat de 10 mm du servo le rend particulièrement adapté au contrôle des ailerons et des volets dans les modèles de planeurs RC avec des profils d'ailes minces. Le servo est logé dans un boîtier en aluminium pour un refroidissement parfait même sous des charges élevées.A l'aide du programmateur/interface USB pour les servos GO et du programme opérateur PC, vous pouvez programmer une large gamme de paramètres de servo (points de fin de course du servo, position inverse et neutre du servo, protection contre les surcharges, démarrage progressif, sécurité intégrée, etc...).Tension d'alimentation accrue 6,0-7,4 V (nominal).
Arbre de sortie à 25 dents.



