


Programmable digital high torque pico servo with titanium gearing and dual BB-ed output shaft for small RC aircraft models, 1:14-1:24 RC cars, 400-450 size helicopters etc. Plastic housing with central aluminum heat sink for perfect cooling under high load.
GO-1013MG is programmable using the KAVAN GO servo programmer/USB interface and PC software.
Standard input voltage range 4.8-6.0 V (nominal).
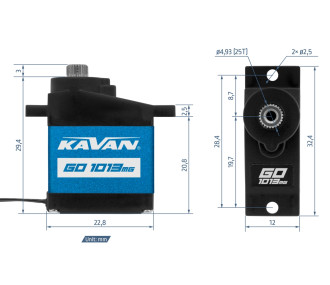
Output shaft 25T/4.94 mm.
 Paiement sécurisé
Paiement sécurisé
 Livraison 24/48h
Livraison 24/48h
 Paiement 3X
Paiement 3X
Servo type Digital
Programmable Yes
Thrust at 4.8 V [kg/cm] 3
Thrust at 6.0V [kg/cm] 3.8
Speed at 4.8V [s/60st] 0.15
Speed at 6.0V [s/60st] 0.12
Titanium servo gears
Ball bearings 2×
High voltage No
Power supply [V] 4.8 - 6
Length [mm] 22.8
Width [mm] 12
Height [mm] 29.4
Weight [g] 15
Suitable for airplanes, helicopters, passenger cars, off-road vehicles, boats
Programmable functions
Servo Angle: Set the maximum range of the servo rotation angle. The default range is about 120° in the normal RC signal pulse width range (900~2100 µs); about 180° in the maximum signal pulse width range (500~2500 µs).
Servo Neutral: Set the neutral (center) position of the servo.
Damping Factor: Sets the servo damping - adjusts the servo characteristics at standstill.
PWM Power: Adjusts the power output of the servo. The higher the power, the higher the servo speed and torque, but the higher the current consumption.
Sensitivity: Sets the servo sensitivity (deadband). The higher the sensitivity, the narrower the deadband - the servo will only move if the change in signal pulse width is greater than the deadband width. Setting the sensitivity too high can cause servo instability in some applications. Setting range: Ultra high (approx. 1 µs deadband) - High (approx. 2 µs) - Medium (approx. 3 µs) - Low (approx. 4 µs)
Soft start: Enables/disables the soft start function. If enabled, the servo will slowly move to the initial position corresponding to the servo signal once the power is turned on.
Reverse: Reverses the direction of servo travel.
Narrow Band: FUTABA SR mode - for use only with FUTABA radio channels operating in SR mode. Do not enable this option if you are using a different setting on your FUTABA radio or any other radio.
SANWA SSR: SANWA SSR Mode - use only with SANWA radio channels operating in SSR mode. Do not enable this option if you are using a different setting on your SANWA radio or any other radio.
PPM Fail-Safe: In the event that the control signal from the receiver is completely lost or cannot be decoded properly (due to interference), the servo can select one of three safety modes:
(a) Release: No safety protection.
(b) Hold Position: Holds the position corresponding to the last correct command signal.
(c) Go to neutral position: The servo returns to the neutral position (1500 µs pulse width).
Overload Protection: Enables or disables the three-stage servo overload protection - once the overload condition lasts for the preset time (in seconds), the servo output power is reduced to the corresponding preset level (% of maximum power).
Default: Resets the connected servo to its factory default setting.











Programmable digital high torque pico servo with titanium gearing and dual BB-ed output shaft for small RC aircraft models, 1:14-1:24 RC cars, 400-450 size helicopters etc. Plastic housing with central aluminum heat sink for perfect cooling under high load.
GO-1013MG is programmable using the KAVAN GO servo programmer/USB interface and PC software.
Standard input voltage range 4.8-6.0 V (nominal).
Output shaft 25T/4.94 mm.